0. Main

I am an assistant professor at the University of Michigan, Ann Arbor (Aerospace), where I lead the Intelligent Robotics and Autonomy Lab (iRaL). Previously, I was a research scientist at the Massachusetts Institute of Technology (MIT | AeroAstro & LIDS), and a Ph.D. student at the University of Pennsylvania (UPenn | ESE).
I am a recipient of an Army Early Career Program (ECP) Award, an NSF CAREER Award, the Best Paper Award in Robot Vision at the 2020 International Conference on Robotics and Automation (ICRA), an Honorable Mention from the 2020 IEEE Robotics and Automation Letters (RA-L), and a Best Student Paper Finalist Award at the 2017 IEEE Conference on Decision and Control (CDC).
My team and I research scalable and reliable algorithms that help mobile cyber-physical systems adaptively perceive their surroundings, self-navigate, and collaborate. We also investigate adaptive vehicle structures that can enhance the said autonomous behaviors and even enable new ones. We focus on autonomous systems that must operate in resource-constrained, unstructured, and contested environments, such as the systems found in defense, disaster response, and smart cities.
We work at the intersection of control, robotics, combinatorial optimization, and online learning, contributing, on the cyber side, resource-aware and near-optimal algorithms for perception, control, and multi-agent coordination, and, on the physical side, morphable aerial vehicles for superior control authority and situational awareness.
[CV, Bio | Google Scholar | vtzoumas ![]() umich.edu (he/him/his) | 3049 François-Xavier Bagnoud Building]
umich.edu (he/him/his) | 3049 François-Xavier Bagnoud Building]
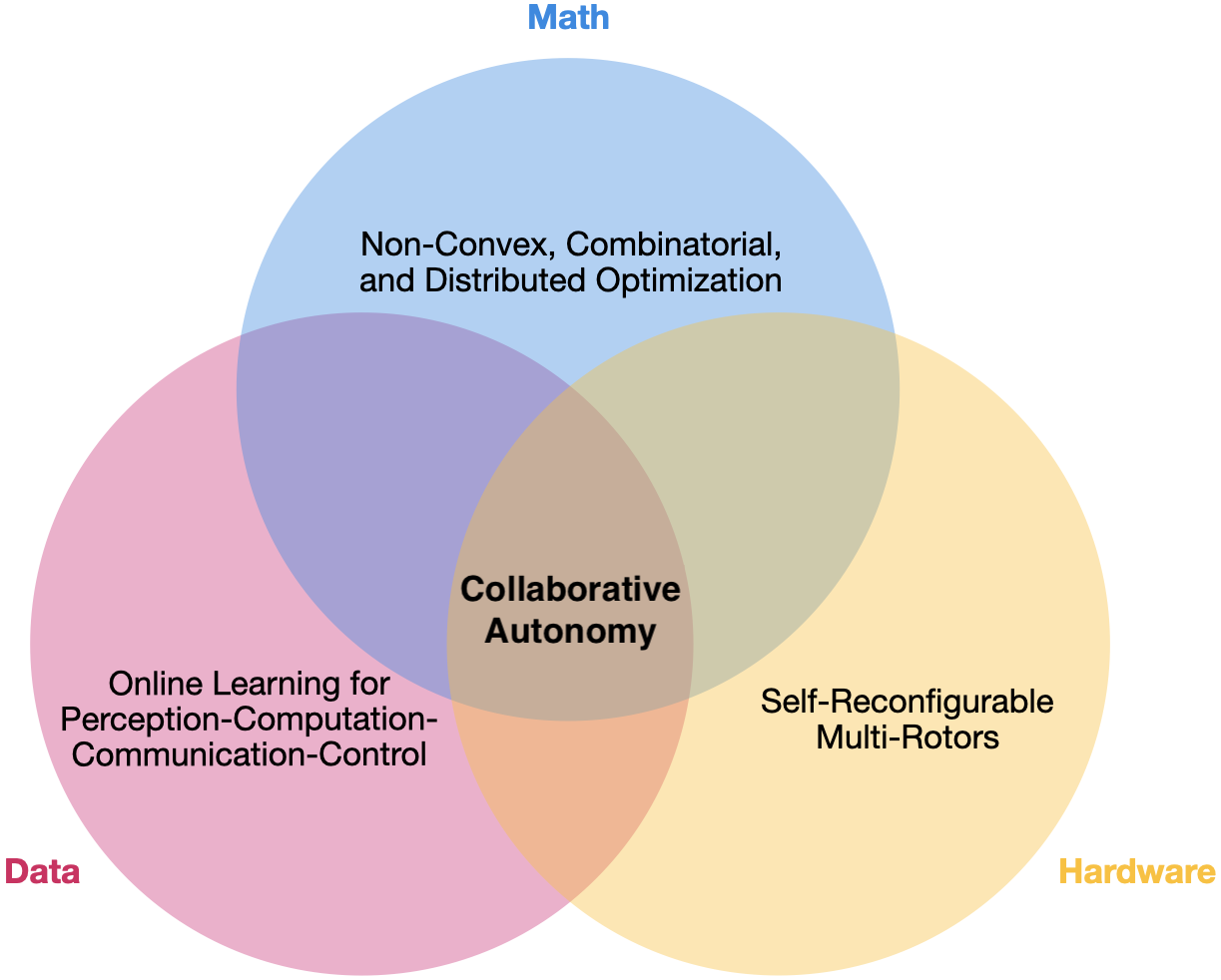
RESEARCH INTERESTS
Collaborative Autonomy:
- Online Learning and Optimization
- Perception-Computation-Communication-Control Co-Design
- Novel Self-Reconfigurable Robots
Applications:
- Online Learning for Extreme Agility
- Multi-Robot Planning in Resource-Constrained, Unpredictable, Contested Environments
- Resilient Morphable Multi-Rotors
[Team | Publications | Bio]
.
RECENT NEWS
- 04/01/2026: Paper on Self-configurable mesh-networks for scalable distributed submodular bandit optimization, introducing the metric Value of Collaboration to enable the agents in a multi-agent network to decide with whom other agents to coordinate to optimize decision time and optimality.
- 04/01/2026: Paper on Distributed Equilibrium-Seeking in Target Coverage Games via Self-Configurable Networks under Limited Communication.
- 04/01/2026: Paper on Distributed Online Submodular Maximization under Communication Delays: A Simultaneous Decision-Making Approach. Accepted to ACC.
- 01/16/2026: Invited seminar at the 12th Midwest Workshop on Control and Game Theory, April 25-26. Thank you for the kind invitation!
- 01/10/2026: Associate editor for IROS 2026.
- 12/01/2025: Paper Adaptive Legged Locomotion via Online Learning for Model Predictive Control accepted at IEEE Robotics and Automation Letters (RAL).
- 10/15/2025: Associate editor for L4DC 2026.
- 09/30/2025: Excited to give seminars next semester at Lehigh U, UCSD, UW, and IMSI workshop on New Directions in Reinforcement Learning and Control at U Chicago. Thank you for the kind invitations!
- 09/30/2025: Invited talk at the 2025 IROS Workshop on Data-Enabled Learning and Control for Robotics. Thank you for the kind invitation.
- 09/04/2025: Jiawei Xu (Ph.D. @ Lehigh with David Saldaña) will be joining the group as a post-doc to work on our morphable quadrotor, investigating self-adaptive online learning for proprioception, predictive control, and aerial manipulation.
- 09/03/2025: Lecture 1’s slides from my new course on Online learning for control of single- and multi-robot systems.
- 08/21/2025: Received an Army Early Career (ECP) award. Indebted for the honor and the generous support. Proud of my students. Special thanks to my first three Ph.D. students, Zirui Xu, Hongyu Zhou, and Atharva Navsalkar, for their vision and hard work on resource-aware and self-adaptive decentralized learning and control. Cool papers to appear soon.
- 06/01/2025: Awarded a grant from the Michigan Translational Research and Commercialization (MTRAC) program to continue our work on our morphable quadrotor. This award is a continuation of an MTRAC Kickstarter award. Thank you for the generous support.
- 05/07/2025: Paper MorphEUS: Morphable Omnidirectional Unmanned System accepted at the Workshop on Open Challenges in Robotics for Asset Inspection and Management, IEEE International Conference on Robotics and Automation (ICRA). With Ivan Bao, Jose C. D. P. G. Pacheco, Atharva Navsalkar, Andrew Scheffer, Sashreek Shankar, Andrew Zhao, and Hongyu Zhou.
- 05/01/2025: Paper on End-to-End Learning Framework for Solving Non-Markovian Optimal Control accepted at International Conference on Machine Learning (ICML). With Xiaole Zhang, Peiyu Zhang, Xiongye Xiao, Shixuan Li, Vijay Gupta, and Paul Bogdan.
- 04/29/2025: Course announcement for Fall 2025: Online Learning for Single- and Multi-Agent Control.
- 04/22/2025: Paper on Simultaneous System Identification and Model Predictive Control with No Dynamic Regret accepted at IEEE Transactions on Robotics (TRO). With Hongyu Zhou.
- 04/22/2025: Paper on No-Regret Model Predictive Control with Online Learning of Koopman Operators accepted at American Control Conference. With Hongyu Zhou.
- 04/14/2025: Paper on Communication- and Computation-Efficient Distributed Submodular Optimization in Robot Mesh Networks accepted at IEEE Transactions on Robotics (TRO). With Sandilya Sai Garimella (now at GaTech) and Zirui Xu.
- 03/27/2025: Awarded grant from the Charles Stark Draper Laboratory to support our work on decentralized multi-agent control for situational awareness. Thanks to Draper and my Draper collaborator, Dr. Begum Cannataro.
- 03/10/2025: Hongyu Zhou and Zirui Xu receive the prestigious Rackham Predoctoral Fellowship. Congrats!
- 01/31/2025: Elevated to IEEE Senior Member. Thank you to my letter writers.
- 01/20/2025: Associate Editor for IEEE/RSJ IROS 2025.
- 01/28/2025: I will be giving several talks this year, including at MSU (Robotics seminar series), Univ Lisboa (Institute for Systems and Robotics), UC Berkeley (Semiautonomous seminar series), Toyota RI, and an Autonomy Talk. Looking forward to seeing you all!
- 08/21/2024: Received an NSF CAREER award. Proud of my students. Special thanks to my first two Ph.D. students, Zirui Xu and Hongyu Zhou, and to Sandilya Garimella (now Ph.D. student at GaTech), Xiaofeng Lin and Yichen Song (now both Ph.D. students at BU).
- 07/24/2024: Invited session at CDC 2024 on Submodularity in Control, Robotics, and Machine Learning: Applications, Challenges, and Opportunities. Co-organized with Prof. Solmaz S. Kia of UCI and Prof. Linda Bushnell of UW. Exciting line of speakers! See you there: Wednesday, December 18, 2024, 14:50-15:10 hrs.
- 07/24/2024: Paper on Performance-Aware Self-Configurable Multi-Agent Networks: A Distributed Submodular Approach for Simultaneous Coordination and Network Design accepted at CDC 2024. With Zirui Xu.
- 07/16/2024: Paper on Communication- and Computation-Efficient Distributed Decision-Making in Multi-Robot Networks. With Zirui Xu and Sandilya Garimella.
- 07/07/2024: Paper on Simultaneous System Identification and Model Predictive Control with No Dynamic Regret. With Hongyu Zhou.
- 01/20/2024: Upcoming invited seminars at UCSB, UBC, and USC during this March. Looking forward to seeing friends and colleagues.
- 01/20/2024: Paper on Leveraging Untrustworthy Commands for Multi-Robot Coordination in Unpredictable Environments: A Bandit Submodular Maximization Approach has been accepted to ACC 2024. With Zirui Xu and Xiaofeng Lin.
- 01/20/2024: Associate Editor for IEEE/RSJ IROS 2024 (this is the 4th year, wow; a pleasure to serve such a vibrant robotics venue).
- Older news…
Ithaca | Constantine P. Cavafy (1911) As you set out for Ithaca hope your road is a long one, full of adventures, full of learning. Laistrygonians, Cyclops, angry Poseidon —don’t be afraid of them: you’ll never find things like that on your way as long as you keep your thoughts raised high, as long as a rare excitement stirs your spirit and your body. Laistrygonians, Cyclops, wild Poseidon—you won’t encounter them unless you bring them along inside your soul, unless your soul sets them up in front of you. Hope your road is a long one. [...] Ithaca gave you the marvelous journey. Without her you wouldn't have set out. She has nothing left to give you now. And if you find her poor, Ithaca won’t have fooled you. Wise as you will have become, so full of experience, you’ll have understood by then what these Ithacas mean. [full poem, in Greek, and translated in English]
