I care for a trustworthy collaborative autonomy in changing, unknown, and adversarial environments. I care for impact on safety-critical applications, such as:
- multi-target tracking, persistent monitoring, and surveillance;
- self-navigation in crowded cities or extraterrestrial environments;
- failure-prone and/or attack-susceptible multi-robot networks.
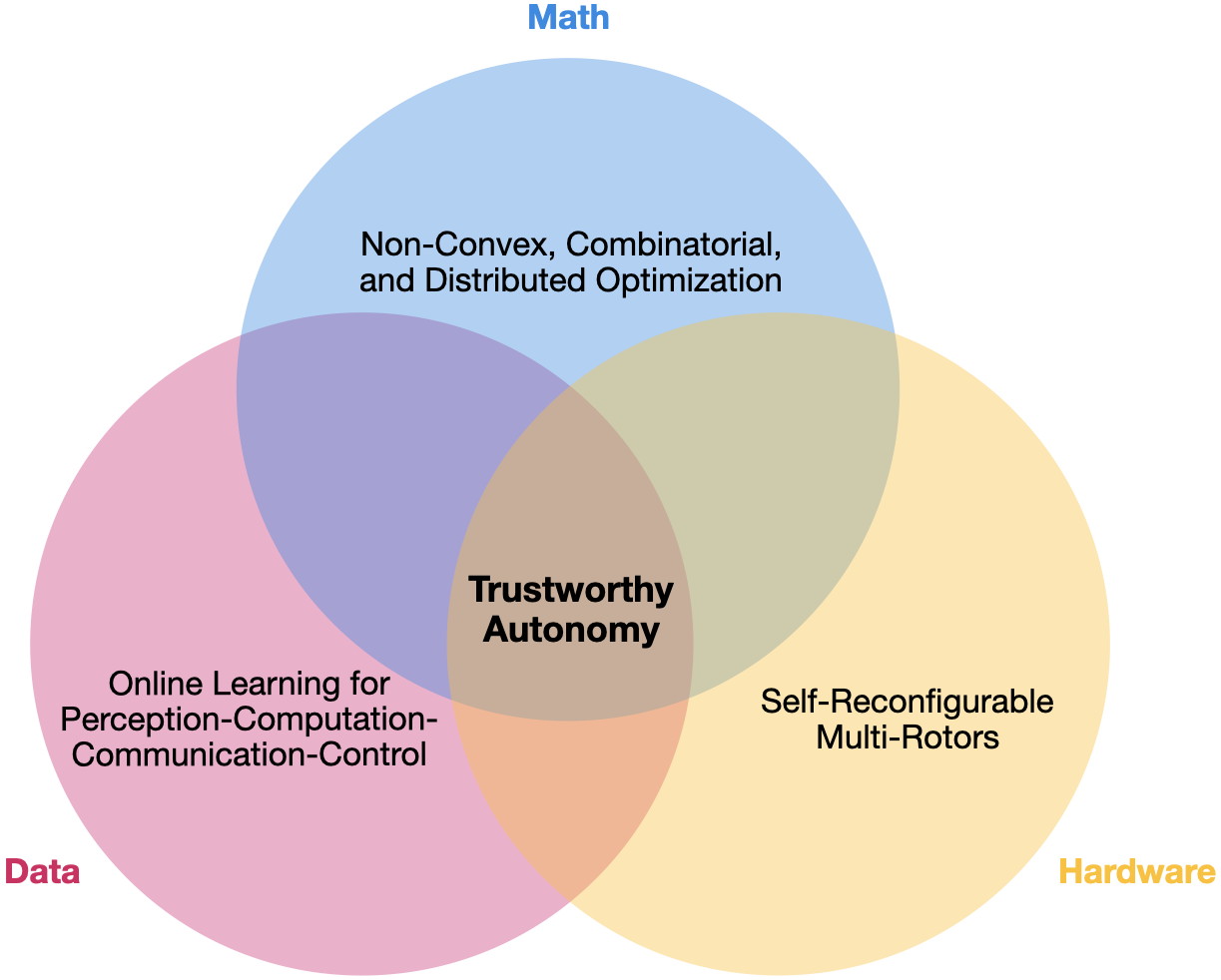
I aim for a technological convergence between:
- cyber capabilities for an adaptive distributed intelligence, driven by online learning for perception, communication, planning, and control, (and their co-design), and
- physical capabilities of novel self-reconfigurable aerial systems.
I build on tools of perception, control, and online learning and optimization to:
- identify fundamental optimization limits;
- develop provably optimal algorithms;
- build novel robotic platforms;
- apply the research outcomes.